Solve the first order differential equations¶
$\frac{dy}{dt} = f(t,y)$, $y(t_0) = y_0$ and $a \le t \le b$.
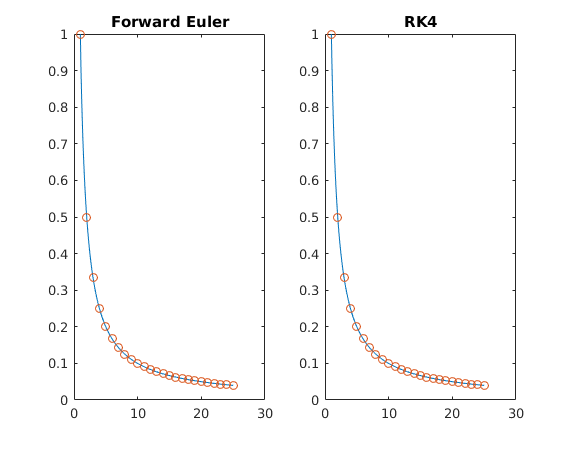
For example, $\frac{dy}{dt} = -5 t y^2+\frac{5}{t}-\frac{1}{t^2}$, $y(0) = 1$ and $1 \le t \le 25$
In [21]:
%plot gnuplot
In [22]:
function [y]=forwardeuler(a, b,h, y0, f)
% function [y]=forwardeuler(a, b,h, y0, f)
% Forward Euler Method
% end points a and b
% time step h
% initial condition y0
% input function f
y(1)=y0;
t=a : h : b;
n=length(t);
for i=1:n-1
y(i+1)=y(i)+h*f(t(i),y(i));
end
end
In [23]:
function [ y ] = rk4( a,b,h,y0, f)
% function [ y ] = rk4( a,b,h,y0, f)
% Runge-Kutta fourth order method
% end points a and b
% time step h
% initial condition y0
% input function f
y(1)=y0;
t=a : h : b;
n=length(t);
for i=1:n-1
f1=f(t(i),y(i));
Y2=y(i)+0.5*h*f1;
f2=f(t(i)+h/2, Y2);
Y3=y(i)+0.5*h*f2;
f3=f(t(i)+h/2, Y3);
Y4=y(i)+h*f3;
f4=f(t(i)+h, Y4);
y(i+1)=y(i)+(h/6)*(f1+2*f2+2*f3+f4);
end
end
In [25]:
clear all
h= 0.1;
a=1;
b=25;
y0=1;
f=@(t,y) -5*t*y^2+(5/t)-(1/t^2);
[y1] = forwardeuler(a, b, h, y0, f);
[y2] = rk4(a,b,h,y0, f);
t=a : h : b;
t1=a : h*10 : b;
yexact=@(t) 1./t;
figure;
subplot(1,2,1)
plot(t,y1,t1,yexact(t1),'o')
title('Forward Euler')
subplot(1,2,2)
plot(t,y2,t1,yexact(t1),'o')
title('RK4')
print -dpng ode.png
Only Matlab¶
\begin{equation}
\begin{split}
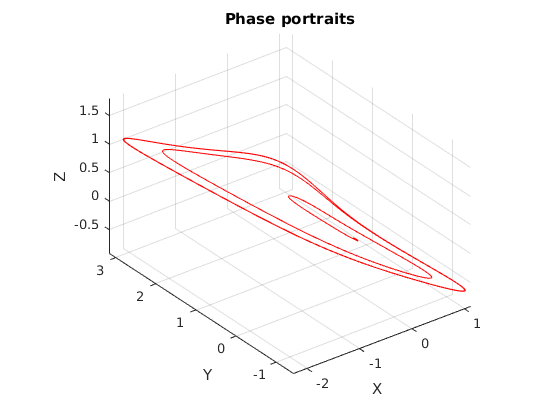
\frac{dX}{dt} & = -X - Y,\\
\frac{dY}{dt} & = -pZ + rY + sZ^2 -Z^2Y,\\
\frac{dZ}{dt} & = -q(X+Z).
\end{split}
\end{equation}
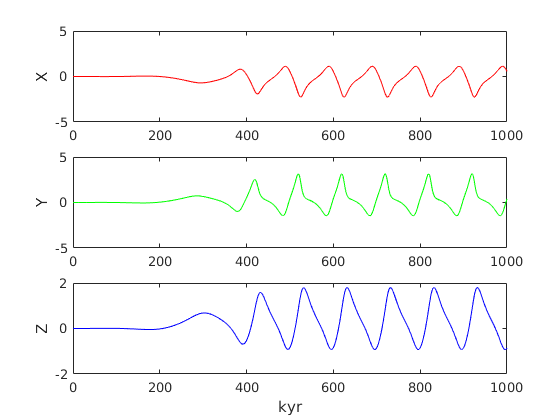
- ice mass ($X$),
- atmospheric carbon dioxide ($Y$) and
- ocean temperature ($Z$).
In [ ]:
function [x,y,z] = climate(p, r, s,q, initV, T, eps)
%
% INITV - initial point
% T - time interval
% EPS - ode solver precision
%
% Example.
% [X Y Z]=climate(1,0.8,0.8,1.2)
% plot3(X,Y,Z);
if nargin<4
error('MATLAB:lorenz:NotEnoughInputs','Not enough input arguments.');
end
if nargin<5
eps = 0.000001;
T = [0 10];
initV = [0.001 0.001 0.001];
end
if nargin<6
eps = 0.000001;
T = [0 100];
end
options = odeset('RelTol',eps,'AbsTol',[eps eps eps/10]);
[T,X] = ode45(@(T,X) F(T, X, p, r, s,q), T, initV, options);
Tscale = 10;
Tdim = T*Tscale;
figure(1)
plot3(X(:,1),X(:,2),X(:,3),'r');
axis equal;
grid;
title('Phase portraits');
xlabel('X'); ylabel('Y'); zlabel('Z');
hold on
figure(2)
subplot(3,1,1);
plot(Tdim,X(:,1),'r');
ylabel('X');
subplot(3,1,2);
plot(Tdim,X(:,2),'g');
ylabel('Y');
subplot(3,1,3);
plot(Tdim,X(:,3),'b');
xlabel('kyr'); ylabel('Z');
x = X(:,1);
y = X(:,2);
z = X(:,3);
return
end
function dx = F(T, X, p, r, s,q);
dx = zeros(3,1);
dx(1) = -X(1) - X(2);
dx(2) = -p*X(3)+r*X(2) + X(3)*X(3)*(s-X(2));
dx(3) = -q*(X(1)+X(3));
end
In [ ]:
[X Y Z]=climate(1,0.8,0.8,1.2)
|
|
|---|